

2024年01月04日
2023年02月01日
クエーサ ジェルブラスターのエアガン化(改造編その1)
クエーサジェルブラスターをエアガンに改造していきます。
撃てないと話にならないので、弾が出る程度に改造します。
まずはマガジンから手を加えます。


Mac10多連マガジンを分解し、給弾機構の羽根車を取り出し、中身をくり抜き、底板を溶接しました。

ゼンマイばねを羽根車の中に入るように加工しました。

歯車の穴を拡大し、ピンを取り付けました。
これらを組み込むことで羽根車を直接回さず、ゼンマイばねを介して回すようにしています。

マガジン中仕切りを加工します。
給弾機構の仕切りを切除し、羽根車に合うように線を引きます。
新たな仕切りを取り付けていきますが、この銃の素材はナイロンのようで、素材としての入手、接着が困難です。


そこでインシュロックを素材として使い、はんだごてによる溶接で接合します。


適当なプラ板で蓋を作りました。
弾の出口付近に突起を設けてあります。
マガジンの加工はこれで終わりです。

特に必要なさそうですが、モーターを交換してみます。
タミヤのミニモーターセットです。


このモーターはマブチのFP030-KN/13125というモーターです。
サイズが若干大きく、完全な互換ではありませんが、少し削れば入ります。
モーターのパワーは少し強いような気がします。
次は本体の改造を行います。


コンパクトサブマシンガンのチャンバーとインナーバレルを取り付けます。
今回はMP7のチャンバーセットを使っていますが、Mac10かVz61用が適しています。
本体の給弾経路との隙間は元のチャンバーから切り出した部品で埋めます

メカボックスとの干渉箇所を削りました。

ホップダイヤルも削ってしまったので、インシュロックを溶接し、タップを立て、ネジで押すように加工しました。

アルミパイプでアウターバレルを作り、本体に合わせてインナーバレルを短縮しました。

ノズルの先端をチャンバーに入るよう削り、給弾しやすくなるよう下部を平らに削りました。
これでようやくBB弾を撃てるようになりました。

ただ、初速が低すぎるのでまだまだ改造は必要です。
撃てないと話にならないので、弾が出る程度に改造します。
まずはマガジンから手を加えます。


Mac10多連マガジンを分解し、給弾機構の羽根車を取り出し、中身をくり抜き、底板を溶接しました。

ゼンマイばねを羽根車の中に入るように加工しました。

歯車の穴を拡大し、ピンを取り付けました。
これらを組み込むことで羽根車を直接回さず、ゼンマイばねを介して回すようにしています。

マガジン中仕切りを加工します。
給弾機構の仕切りを切除し、羽根車に合うように線を引きます。
新たな仕切りを取り付けていきますが、この銃の素材はナイロンのようで、素材としての入手、接着が困難です。


そこでインシュロックを素材として使い、はんだごてによる溶接で接合します。


適当なプラ板で蓋を作りました。
弾の出口付近に突起を設けてあります。
マガジンの加工はこれで終わりです。

特に必要なさそうですが、モーターを交換してみます。
タミヤのミニモーターセットです。


このモーターはマブチのFP030-KN/13125というモーターです。
サイズが若干大きく、完全な互換ではありませんが、少し削れば入ります。
モーターのパワーは少し強いような気がします。
次は本体の改造を行います。


コンパクトサブマシンガンのチャンバーとインナーバレルを取り付けます。
今回はMP7のチャンバーセットを使っていますが、Mac10かVz61用が適しています。
本体の給弾経路との隙間は元のチャンバーから切り出した部品で埋めます

メカボックスとの干渉箇所を削りました。

ホップダイヤルも削ってしまったので、インシュロックを溶接し、タップを立て、ネジで押すように加工しました。

アルミパイプでアウターバレルを作り、本体に合わせてインナーバレルを短縮しました。

ノズルの先端をチャンバーに入るよう削り、給弾しやすくなるよう下部を平らに削りました。
これでようやくBB弾を撃てるようになりました。

ただ、初速が低すぎるのでまだまだ改造は必要です。
2022年12月30日
クエーサ ジェルブラスターのエアガン化(検証編)
かっこいい形のジェルブラスターが売っていたので、エアガン化できるかやってみようと思います。

中身は本体、マガジン、バッテリー、充電器、ジェルボール弾、ゴーグル、説明書。

バッテリーは7.4Vリポバッテリーで、サイズは長さ63mm、幅20mm、厚さ11mm。
容量は驚異の1400mAh。
サイズ的に300mAh程度だと思います。
充電用コネクターはJST-XHで、付属以外のバランス充電器でも充電できます。


バッテリースペースは本体後部にあります。
接続はJST-SMコネクターで、ヒューズはなく、空間には余裕はあまりなさそうです。
エアガン用はまず入らないので、バッテリーを変えるならドローン用のバッテリーから探す必要がありそうです。

早速分解していきます。
赤丸部分のネジを外します。

バッテリー部分のパーツを内側から押して外し、赤丸部分のネジを外します。

アッパーレシーバー部分のパーツを左右に分割して外します。

赤丸部分のネジを外します。

これで本体を分割できます。
中のメカボックスはコンパクトサブマシンガンに酷似しています。
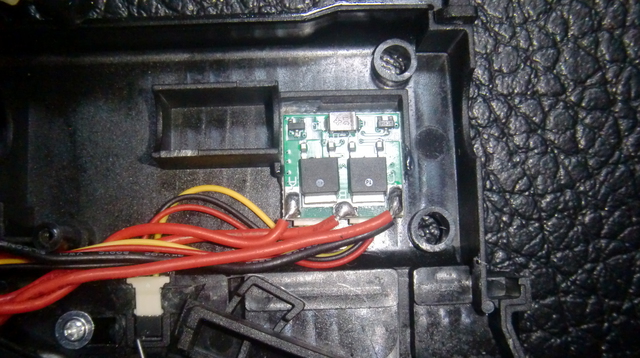
電子回路がついていますが、これはカットオフ制御用の回路で、無接点化はされていません。
トリガーのマイクロスイッチが押されている間通電されます。

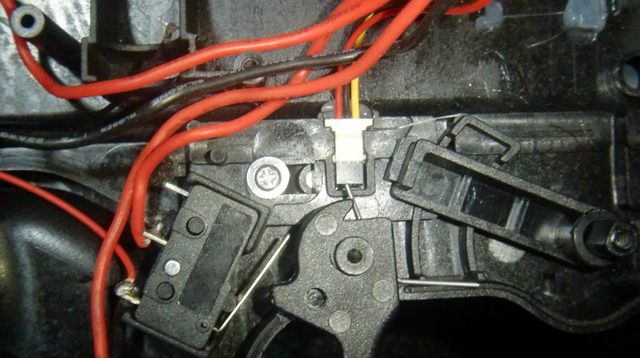
メカボックスとセレクター付近に磁気センサーがついています。

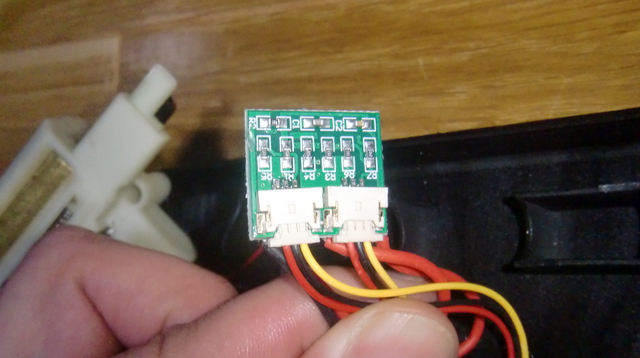
モーター端子に変な配線がついています。
電動マガジン用の配線のようです。

電動マガジン用端子とスイッチです。
スイッチを押すかメカボックスモーター作動時に通電します。

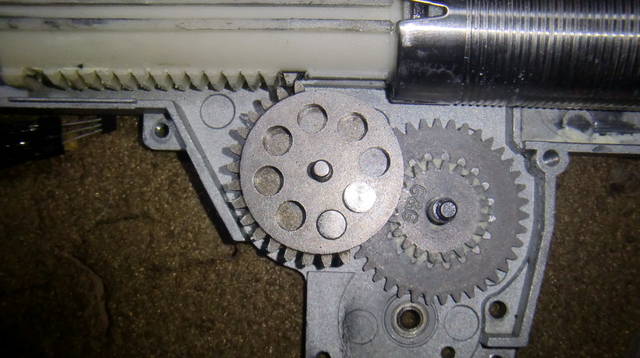
メカボックスを分解しました。
メカボックスケースとギアがプラスチック製です。
軸受は金属製です。
セクターギアに磁石がついています。
カットオフの制御は、セレクター側の磁気センサーが磁気を検知している時に有効になり、
セクターギアの磁気を検知するまでモーターに通電し、磁気を検知するとトリガーを戻すまで停止します。

電動マガジンの分解をします
赤丸のネジを外し、分割します。

マガジン前側の機関部は引っ張れば外れます。


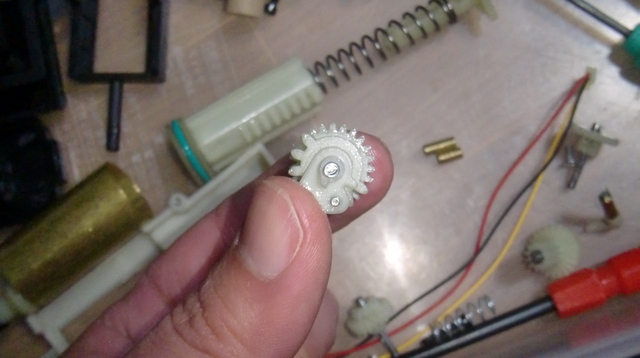
弾送り部分はギアを介してモーターで直接動いています
試しにBB弾を入れて動かしたら、噛みこんで動かなくなりました。

マガジンのモーターはFA-130モーターより小さなモーターが入っていました。
内部スペースはぎりぎりなのでFA-130モーターの流用は不可能です。


コンパクトサブマシンガンMac10の部品と比較してみました。
干渉部分の小加工と、カットオフの制御をどうにかすれば流用できそうです。
ただマガジンにかなり問題があるので、エアガン化は大変そうです。

中身は本体、マガジン、バッテリー、充電器、ジェルボール弾、ゴーグル、説明書。

バッテリーは7.4Vリポバッテリーで、サイズは長さ63mm、幅20mm、厚さ11mm。
容量は驚異の1400mAh。
サイズ的に300mAh程度だと思います。
充電用コネクターはJST-XHで、付属以外のバランス充電器でも充電できます。


バッテリースペースは本体後部にあります。
接続はJST-SMコネクターで、ヒューズはなく、空間には余裕はあまりなさそうです。
エアガン用はまず入らないので、バッテリーを変えるならドローン用のバッテリーから探す必要がありそうです。

早速分解していきます。
赤丸部分のネジを外します。

バッテリー部分のパーツを内側から押して外し、赤丸部分のネジを外します。

アッパーレシーバー部分のパーツを左右に分割して外します。

赤丸部分のネジを外します。

これで本体を分割できます。
中のメカボックスはコンパクトサブマシンガンに酷似しています。


電子回路がついていますが、これはカットオフ制御用の回路で、無接点化はされていません。
トリガーのマイクロスイッチが押されている間通電されます。


メカボックスとセレクター付近に磁気センサーがついています。

モーター端子に変な配線がついています。
電動マガジン用の配線のようです。

電動マガジン用端子とスイッチです。
スイッチを押すかメカボックスモーター作動時に通電します。

メカボックスを分解しました。
メカボックスケースとギアがプラスチック製です。
軸受は金属製です。

セクターギアに磁石がついています。
カットオフの制御は、セレクター側の磁気センサーが磁気を検知している時に有効になり、
セクターギアの磁気を検知するまでモーターに通電し、磁気を検知するとトリガーを戻すまで停止します。

電動マガジンの分解をします
赤丸のネジを外し、分割します。

マガジン前側の機関部は引っ張れば外れます。


弾送り部分はギアを介してモーターで直接動いています
試しにBB弾を入れて動かしたら、噛みこんで動かなくなりました。

マガジンのモーターはFA-130モーターより小さなモーターが入っていました。
内部スペースはぎりぎりなのでFA-130モーターの流用は不可能です。



コンパクトサブマシンガンMac10の部品と比較してみました。
干渉部分の小加工と、カットオフの制御をどうにかすれば流用できそうです。
ただマガジンにかなり問題があるので、エアガン化は大変そうです。
2022年06月26日
M14カービンカスタム
近距離向けの銃が欲しくなったので、作ってみました。

装備とマガジンを共有できるようにM14をベースにカスタムしました。

M14をショート化する場合、構造上バレルをガスシリンダーの位置より短くすることができません。
このままではM14 SOCOM買っておしまいなので、構造を変更して更なる短縮化を目指します。


オペレーティングロッドAss’yを取り外すのが手っ取り早いですが、あえてコッキングアクションを残すため加工します。
カシメ部をドリルで削ってパイプを外します。


外径9mmのアルミパイプをスプリングガイドにして、スプリングを取り付けました。
スプリングは電動ガン用スプリングを使用しています。


ガスシリンダーを切断してぎりぎりまで下げられるようにしました。


アウターバレルを切断し、オペレーティングロッドブラケットとバレル基部取付用の穴を開けました。

スプリングガイドを固定するための部品を切断したアウターバレルで作ります。
内径が少し小さいので削って圧入しました。

タップを切ってネジで固定できるようにしました。

本体側の加工はこれで完了です。
コッキングはフルストロークはできませんが、ここまで引くことができます。
次はストックを加工します。


短縮化以外にピストルグリップと直銃床化を行うので、ストック部を切断します。

切断したらはんだごてを使って溶接します。

ピストルグリップ部分は電動AK用グリップを使います。

母材同士を溶け合わせるようにくっつけて、穴や凹みを切り取った端材やABS板を溶かして埋めます。


補強と凹み埋めを兼ねたパテを切粉とプラリペアリキッドを使って作ります。

溶接面や裏側にパテを塗り、固まるまで置きました。
固まるまで1日ほど必要のようです。


ストック前側とハンドガードも同じように切り詰めました。

あとはレールを取り付けたり、塗装をして完成です。


長さ865mm、重さ3.6kgになりました。

装備とマガジンを共有できるようにM14をベースにカスタムしました。

M14をショート化する場合、構造上バレルをガスシリンダーの位置より短くすることができません。
このままではM14 SOCOM買っておしまいなので、構造を変更して更なる短縮化を目指します。


オペレーティングロッドAss’yを取り外すのが手っ取り早いですが、あえてコッキングアクションを残すため加工します。
カシメ部をドリルで削ってパイプを外します。


外径9mmのアルミパイプをスプリングガイドにして、スプリングを取り付けました。
スプリングは電動ガン用スプリングを使用しています。


ガスシリンダーを切断してぎりぎりまで下げられるようにしました。


アウターバレルを切断し、オペレーティングロッドブラケットとバレル基部取付用の穴を開けました。

スプリングガイドを固定するための部品を切断したアウターバレルで作ります。
内径が少し小さいので削って圧入しました。

タップを切ってネジで固定できるようにしました。

本体側の加工はこれで完了です。
コッキングはフルストロークはできませんが、ここまで引くことができます。
次はストックを加工します。


短縮化以外にピストルグリップと直銃床化を行うので、ストック部を切断します。

切断したらはんだごてを使って溶接します。

ピストルグリップ部分は電動AK用グリップを使います。

母材同士を溶け合わせるようにくっつけて、穴や凹みを切り取った端材やABS板を溶かして埋めます。


補強と凹み埋めを兼ねたパテを切粉とプラリペアリキッドを使って作ります。

溶接面や裏側にパテを塗り、固まるまで置きました。
固まるまで1日ほど必要のようです。


ストック前側とハンドガードも同じように切り詰めました。

あとはレールを取り付けたり、塗装をして完成です。


長さ865mm、重さ3.6kgになりました。
2022年06月22日


2019年06月14日
ARES SOC SLR 分解
ARES SOC SLRを分解します。

後部のネジを2つ外しバットプレートを取り外します。


チークパッド後ろのネジを緩めて、ストック後部を取り外します。


本体側面のネジを4つ取り外し、アッパーレシーバーを取り外します。



スプリングと、ネジを1つ外し、ダミーボルトを取り外します。


ピンを2本抜き取り、メカボックスを取り出します。

メカボックスにARESとキンワの封印シールが張ってありました。



メカボックス後部のマイナスネジを外し、六角レンチを差込み、押し込みながら回すと
スプリングガイドが外れます。

側面のネジを外してメカボックスを開けました。
グリスが大量に塗られていました。
タペットプレート、シリンダーヘッドは専用品のようです。
セクターギアにカットオフ検知用の磁石が取り付けられています。

ノズル長は21.2mm。


メカボックスを取り外したあとにそのままインナーバレルが取り外せます。

インナーバレル長はなんと670mm。


ホップ構造は普通ですが、プラスチックのパーツで直接押すようになっています。

この銃は電子トリガーが標準装備されており、
ロアレシーバーに電子回路、メカボックスに磁気センサーが取り付けられています。

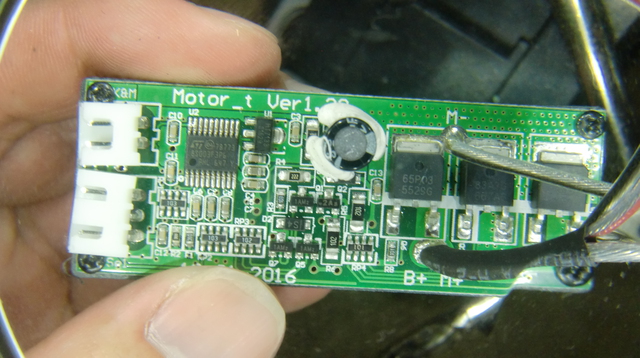

本体後方のネジ2つを外すと電子回路を取り外せます。




マイコン:STM 8S003F3P6
レギュレーター:HT7133
駆動FET:83S3G ×2
ブレーキFET:65P03
動作はトリガーが押された後に磁気センサーが磁石を検知するとブレーキが掛かりモーターが停止します。
磁気センサーが一定時間磁石を検知しないとモーターが停止します。
5回連続で感知しないとトリガーを押しても動かなくなります。

後部のネジを2つ外しバットプレートを取り外します。


チークパッド後ろのネジを緩めて、ストック後部を取り外します。



本体側面のネジを4つ取り外し、アッパーレシーバーを取り外します。



スプリングと、ネジを1つ外し、ダミーボルトを取り外します。


ピンを2本抜き取り、メカボックスを取り出します。

メカボックスにARESとキンワの封印シールが張ってありました。



メカボックス後部のマイナスネジを外し、六角レンチを差込み、押し込みながら回すと
スプリングガイドが外れます。

側面のネジを外してメカボックスを開けました。
グリスが大量に塗られていました。
タペットプレート、シリンダーヘッドは専用品のようです。
セクターギアにカットオフ検知用の磁石が取り付けられています。

ノズル長は21.2mm。


メカボックスを取り外したあとにそのままインナーバレルが取り外せます。

インナーバレル長はなんと670mm。


ホップ構造は普通ですが、プラスチックのパーツで直接押すようになっています。


この銃は電子トリガーが標準装備されており、
ロアレシーバーに電子回路、メカボックスに磁気センサーが取り付けられています。



本体後方のネジ2つを外すと電子回路を取り外せます。




マイコン:STM 8S003F3P6
レギュレーター:HT7133
駆動FET:83S3G ×2
ブレーキFET:65P03
動作はトリガーが押された後に磁気センサーが磁石を検知するとブレーキが掛かりモーターが停止します。
磁気センサーが一定時間磁石を検知しないとモーターが停止します。
5回連続で感知しないとトリガーを押しても動かなくなります。
2019年06月11日
ARES SOC SLR(中古品)
ARESのSOCSLRを買いました。



この銃はARESオリジナルのセミオートスナイパーライフルです。
本体のほかにマガジン1つとバイポッド、クリーニングロッド、説明書が付属しています。

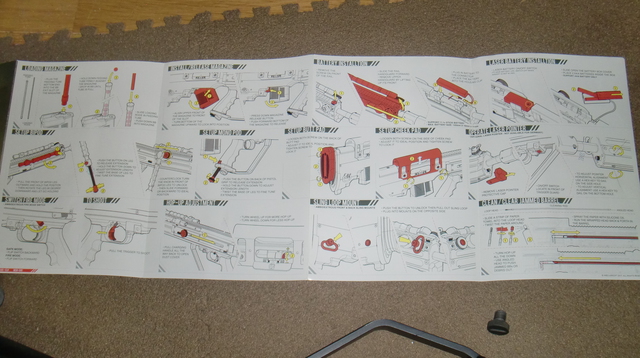

説明書は英語で書かれていますが、詳細なイラストがあるので大体分かると思います。



バイポッドは本体左右の専用レールに取り付けられるものですが、首振りができません。
グリップ下のモノポッドと合わせて銃を固定して定点狙撃するためのもので、
移動しながら使うには不向きです。

マガジンはオリジナルのプラスチック外装のものです。


M14マガジンとの比較。
幅は大体同じで,長さは約2/3です。

この銃はブルパップなのでグリップ後ろに取り付けます。


マガジンキャッチはマガジン後ろにあり、ボタンを押し上げて取り外します。
マガジンは自重で落下します。


銃口のフラッシュハイダーはM14正ネジで取り付けられています。
取り外すとインナーバレルがはみ出します。


ホップ調整はチャージングハンドルを引いて、ダミーボルトを開いて行います。
ダミーボルトはボルトストップで開いたまま固定されます。

ボルトストップの解除は本体左にあるボルトリリースレバーを押し下げます。
結構硬いです。


セーフティーはアンビで人差し指で操作します。


この銃にはレーザーサイトが装備されているようですが、
点かないようにされているようです。


トリガー前にレーザー用のスイッチが付いています。
下側のボタンを押してオンオフをするようです。
左右にあるダイヤルは回すことができますが、ただの飾りのようです。


本体上前方のネジを外し、トップレールを前に引き出し、上に外して、バッテリーの脱着を行います。
バッテリーは11.1V推奨ですが、7.4Vでも駆動できました。

レーザーサイト用の配線は切り取られているようです。


初速はホップを切った状態では67m/s前後ですが、ホップを掛けるほど初速が上がり、
91m/sまで上がりました。


重量は本体のみで5.4kg、バイポッドが814gで、合計6.2kgです。
スコープをつけると、7kg前後になり、とても重たいです。
次回は分解を行います。



この銃はARESオリジナルのセミオートスナイパーライフルです。
本体のほかにマガジン1つとバイポッド、クリーニングロッド、説明書が付属しています。



説明書は英語で書かれていますが、詳細なイラストがあるので大体分かると思います。



バイポッドは本体左右の専用レールに取り付けられるものですが、首振りができません。
グリップ下のモノポッドと合わせて銃を固定して定点狙撃するためのもので、
移動しながら使うには不向きです。

マガジンはオリジナルのプラスチック外装のものです。


M14マガジンとの比較。
幅は大体同じで,長さは約2/3です。

この銃はブルパップなのでグリップ後ろに取り付けます。


マガジンキャッチはマガジン後ろにあり、ボタンを押し上げて取り外します。
マガジンは自重で落下します。


銃口のフラッシュハイダーはM14正ネジで取り付けられています。
取り外すとインナーバレルがはみ出します。


ホップ調整はチャージングハンドルを引いて、ダミーボルトを開いて行います。
ダミーボルトはボルトストップで開いたまま固定されます。

ボルトストップの解除は本体左にあるボルトリリースレバーを押し下げます。
結構硬いです。


セーフティーはアンビで人差し指で操作します。


この銃にはレーザーサイトが装備されているようですが、
点かないようにされているようです。


トリガー前にレーザー用のスイッチが付いています。
下側のボタンを押してオンオフをするようです。
左右にあるダイヤルは回すことができますが、ただの飾りのようです。


本体上前方のネジを外し、トップレールを前に引き出し、上に外して、バッテリーの脱着を行います。
バッテリーは11.1V推奨ですが、7.4Vでも駆動できました。

レーザーサイト用の配線は切り取られているようです。


初速はホップを切った状態では67m/s前後ですが、ホップを掛けるほど初速が上がり、
91m/sまで上がりました。


重量は本体のみで5.4kg、バイポッドが814gで、合計6.2kgです。
スコープをつけると、7kg前後になり、とても重たいです。
次回は分解を行います。
2019年06月03日
2019年05月08日
電子トリガーを作る その4
その3の続き。
ヒューズが飛ぶ問題への対処を行います。
どんな感じに飛ぶというと、撃っていると突然ショートしたようになってヒューズが飛びます。
色々と調べてみるとこういったページを見つけました。
ページに書いてあることによるとアンダーシュートが原因と思われます。

アンダーシュートによって2つのFETが同時にオンになりショートしてしまい、ヒューズが飛んでしまうようです。
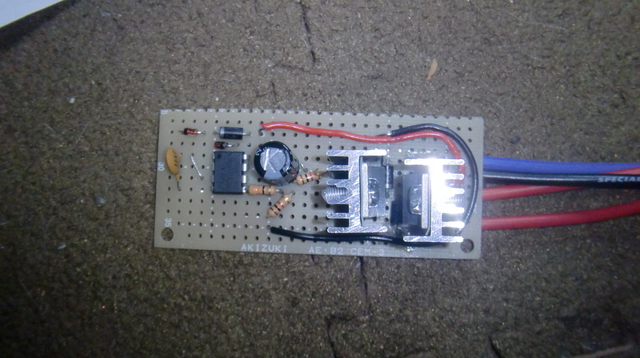
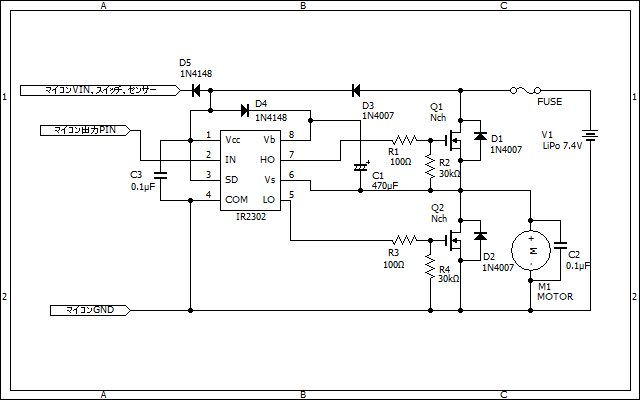
そこで対策として、
1.ブートストラップコンデンサの容量を再計算、470μF→47μFへ変更。
2.Vcc端子とCOM端子の間に470μFの電解コンデンサを追加。
3.ゲート抵抗を33Ω→47Ωへ変更。
その他に、バッテリー電圧を測定する分圧抵抗を追加したり
センサー用の電源をマイコンと別にしました。
最終的な回路はこちらです。

マガジンに磁石を仕込んで、これを磁気センサーで検出してボルトストップするようにしました。

ボルトストップはチャージングハンドルを引くことで解除できるようにしています。

プログラムは以下の通り。
ヒューズが飛ぶ問題への対処を行います。
どんな感じに飛ぶというと、撃っていると突然ショートしたようになってヒューズが飛びます。
色々と調べてみるとこういったページを見つけました。
ページに書いてあることによるとアンダーシュートが原因と思われます。

アンダーシュートによって2つのFETが同時にオンになりショートしてしまい、ヒューズが飛んでしまうようです。
そこで対策として、
1.ブートストラップコンデンサの容量を再計算、470μF→47μFへ変更。
2.Vcc端子とCOM端子の間に470μFの電解コンデンサを追加。
3.ゲート抵抗を33Ω→47Ωへ変更。
その他に、バッテリー電圧を測定する分圧抵抗を追加したり
センサー用の電源をマイコンと別にしました。
最終的な回路はこちらです。


マガジンに磁石を仕込んで、これを磁気センサーで検出してボルトストップするようにしました。

ボルトストップはチャージングハンドルを引くことで解除できるようにしています。

プログラムは以下の通り。
//F2000用FCUプログラムVer.1.03
//改訂記録============================================================================
//Ver.1.01 モーターロック保護処理の追加
//Ver.1.02 ボルトストップ時にピストンを前進位置で停止するよう変更
//Ver.1.03 ボルトストップ解除時に発射されてしまう不具合を修正
//入出力ピンの名称変更=================================================================
#define SEMI_SW A0 //セミオートスイッチ
#define VAL_IN A1 //電圧測定入力
#define FULL_SW 4 //フルオートスイッチ
#define SAFETY_SW 2 //セーフティスイッチ
#define CUTOFF_SW 3 //カットオフスイッチ
#define NO_AMMO_SW 6 //残弾無し検知スイッチ
#define COCKING_FOWARD_SW 7 //コッキングハンドル前進検知スイッチ
#define COCKING_BACK_SW 8 //コッキングハンドル後退検知スイッチ
#define MOTOR 9 //モーター制御出力
#define INDICATOR 10 //インジケーターLED
#define LED 13 //マイコンLED
//定数の宣言===========================================================================
const byte PWM = 254; //フルオートサイクル調整用定数、254まで
const unsigned int PRECOCK = 30;//プリコック時間(ミリ秒)
const unsigned int DECOCK = 0; //デコック時間(ミリ秒)
const unsigned int SW_ON = 280; //セミオートスイッチオン閾値
const unsigned int SW_OFF = 90; //セミオートスイッチオフ閾値
const unsigned int CHATA_SEMI = 0; //セミオートスイッチチャタリング防止(マイクロ秒、1/1000ミリ秒)
const unsigned int CHATA_FULL = 5000; //フルオートスイッチチャタリング防止(マイクロ秒、1/1000ミリ秒)
const unsigned int CHATA_CUTOFF = 0; //カットオフスイッチチャタリング防止(マイクロ秒、1/1000ミリ秒)
const bool ON = LOW, OFF = HIGH; //スイッチ用定数、混乱防止のため
const bool SEMI = false, FULL = true; //フル・セミ切り替え用定数
const unsigned int V_R1 = 1000; //電圧検知VIN側抵抗値(Ω)
const unsigned int V_R2 = 1000; //電圧検知GND側抵抗値(Ω)
const unsigned int LIMIT_VAL_S = 740; //待機時電圧下限値(V×100)
const unsigned int LIMIT_VAL_M = 610; //稼働時電圧下限値(V×100)
const unsigned int VF = 70; //ダイオード順方向降下電圧値(V×100)
//変数の宣言===========================================================================
volatile int Fire = 0; //発射制御用変数
volatile unsigned int Semi_Sw = 0; //セミオートスイッチ用変数
volatile bool Cutoff = LOW, Old_Cutoff = LOW; //カットオフセンサー用変数
volatile bool SemiTrg = OFF, Old_SemiTrg = OFF; //セミオート処理用変数
volatile bool FullTrg = OFF, Old_FullTrg = OFF; //フルオート処理用変数
volatile bool Shot_Mode = SEMI;//フル/セミ切り替え用変数
volatile bool No_Ammo = LOW;//残弾無し検知用変数
volatile bool Bolt_Stop = false;//ボルトストップ処理用変数
volatile bool Cocking_Fowad = LOW;//コッキングハンドル前進検知用変数
volatile bool Cocking_Back = LOW;//コッキングハンドル後退検知用変数
volatile bool Fast_Shot = true;//ファストショット処理用変数
bool Battery_Low = false;//バッテリー低下処理用変数
float Vcc = 0; //基準電圧(V)
unsigned int Val = 0;//測定電圧(V×100)
unsigned long Time = 0, Old_Time = 0; //電圧測定時間記録(ミリ秒)
unsigned long M_Time = 0 ,Old_M_Time = 0; //モーター駆動時間記録(ミリ秒)
//セットアップ=========================================================================
void setup() {
//入出力ピンの設定=====================================================================
pinMode(FULL_SW,INPUT);
pinMode(CUTOFF_SW,INPUT);
pinMode(NO_AMMO_SW,INPUT);
pinMode(COCKING_FOWARD_SW,INPUT);
pinMode(COCKING_BACK_SW,INPUT);
pinMode(SAFETY_SW,INPUT);
attachInterrupt(digitalPinToInterrupt(SAFETY_SW),SAFETY_MODE,LOW);
pinMode(LED,OUTPUT);
pinMode(INDICATOR,OUTPUT);
//起動処理============================================================================
digitalWrite(INDICATOR,HIGH);
analogWrite(MOTOR,0);
delay(1000); //1秒待つ
}
//メインプログラム====================================================================
void loop() {
digitalWrite(INDICATOR,LOW);
Time = millis(); //現在の時間を取得(バッテリー電圧測定用)
M_Time = millis(); //現在の時間を取得(モーターロック保護処理用)
//現在の各スイッチの状態を検知========================================================
Cutoff = digitalRead(CUTOFF_SW);
Semi_Sw = analogRead(SEMI_SW);
/*セミオートスイッチに光センサーを使うため
*オン・オフの処理を追加
*/
if(Semi_Sw >= SW_ON){
SemiTrg = ON;
/*光センサーの数値が定数SW_ONの閾値以上の場合
*セミオートスイッチをオンとする
*/
}
if(Semi_Sw <= SW_OFF){
SemiTrg = OFF;
/*光センサーの数値が定数SW_OFFの閾値以下の場合
*セミオートスイッチをオフとする
*/
}
FullTrg = digitalRead(FULL_SW);
No_Ammo = digitalRead(NO_AMMO_SW);
Cocking_Back = digitalRead(COCKING_BACK_SW);
//カットオフスイッチの状態をLEDで表示
if(Cutoff == HIGH){
digitalWrite(LED,HIGH);
}
if(Cutoff == LOW){
digitalWrite(LED,LOW);
}
//モーター動作処理====================================================================
if(Fire >= 1){
//変数Fireが1以上のときモーター作動
switch (Shot_Mode == FULL){
//モーターの出力変更
case FULL:
if(Fast_Shot == true){
analogWrite(MOTOR,254);
}
else{
analogWrite(MOTOR,PWM);
}
break;
/*フルオート時、最初の1発は最大出力
*それ以降、変数PWMの値の出力
*/
default:
analogWrite(MOTOR,254);
//セミオート時、最大出力
}
//モーターロック保護処理================================================================
while(M_Time - Old_M_Time >= 200){
analogWrite(MOTOR,0);
digitalWrite(INDICATOR,HIGH);
delay(100);
digitalWrite(INDICATOR,LOW);
delay(100);
/*トリガーが押されてから、または
*カットオフスイッチを検出してから200ミリ秒以上
*新たなカットオフスイッチを検出しなかった場合
*モーターを停止し、インジケーターLEDを点滅する
*/
}
//残弾無し処理=========================================================================
if(No_Ammo == HIGH){
Fire = 1;
/*残弾無し検知スイッチがオンの時、
*変数Fireの値を1にする
*/
}
}
//カットオフ処理=======================================================================
if(Fire > 1){
if(Cutoff == HIGH && Old_Cutoff == LOW){
Fire = Fire - 1;
Fast_Shot = false;
Old_M_Time = M_Time; //カットオフ検出の時間を記録(モーターロック保護処理用)
Val = GetVal(analogRead(VAL_IN)); //電圧を取得
if(Val < LIMIT_VAL_M){ //稼働時下限値を下回ったとき
Battery_Low = true; //変数Battery_Lowをtrueにし、
Fire = 1; //変数Fireの値を1にする
}
/*カットオフスイッチがLOWからHIGHなったときに
*変数Fireの数字を1引き、変数Fast_Shotをfalseにする
*/
}
Old_Cutoff = Cutoff;
}
if(Fire == 1){
if(Cutoff == HIGH && Old_Cutoff == LOW){
analogWrite(MOTOR,254);
Val = GetVal(analogRead(VAL_IN)); //電圧を取得
if(Val < LIMIT_VAL_M){ //稼働時下限値を下回ったとき
Battery_Low = true; //変数Battery_Lowをtrueにする
}
if(Cocking_Back == ON || No_Ammo == HIGH){
delay(DECOCK);
}else{
delay(PRECOCK);
}
analogWrite(MOTOR,0);
Fire = 0;
Shot_Mode = SEMI;
Fast_Shot = true;
Time = millis();
Old_Time = Time; //モーターが停止した時間を記録(バッテリー電圧測定用)
/*変数Fireが1に等しい場合、
*カットオフスイッチがLOWからHIGHになった時に
*コッキングハンドル検知スイッチがオフの時
*定数PRECOCKミリ秒後、モーターを停止し、
*コッキングハンドル検知スイッチがオンの時、
*あるいは残弾無し検知スイッチがオンの時、
*定数DECOCKミリ秒後、モーターを停止する
*/
if(No_Ammo == HIGH){
//残弾無し処理
Bolt_Stop = true;
/*残弾無し検知スイッチがオンの時、
*ボルトストップを行う
*/
}
}
Old_Cutoff = Cutoff;
}
if(Cutoff == LOW && Old_Cutoff == HIGH ){
delayMicroseconds(CHATA_CUTOFF);
/*カットオフスイッチがONからOFFになったとき
*チャタリング防止のため
*定数CHATA_CUTOFFマイクロ秒停止する
*/
}
//トリガー処理=========================================================================
/* 変数Bolt_Stopがfalseの時
* かつ、変数Battery_Lowがfalseの時のみ
* トリガー入力を受け付ける
*/
if(Bolt_Stop == false && Battery_Low == false){
//セミオート処理=======================================================================
if(Fire == 0 ){
analogWrite(MOTOR,0);
Shot_Mode = SEMI;
/*変数Fireの値が0の時
*セミオート入力を受け付ける
*/
if(SemiTrg == ON && Old_SemiTrg == OFF){
Fire = 1;
Shot_Mode = SEMI;
/*セミオートスイッチがOFFからONになったとき
*変数Fireに1を代入する
*/
Old_M_Time = M_Time; //セミオートトリガーが押された時間を記録(モーターロック保護処理用)
}
if(SemiTrg == OFF && Old_SemiTrg == ON){
delayMicroseconds(CHATA_SEMI);
/*セミオートスイッチがONからOFFになったとき
*チャタリング防止のため
*定数CHATA_SEMIマイクロ秒停止する
*/
}
}
//フルオート処理=======================================================================
if(SemiTrg == ON && No_Ammo == LOW){
if(FullTrg == ON){
Fire = 2;
Shot_Mode = FULL;
/*セミオートスイッチがONのままの場合フルオートスイッチを受け付け
*フルオートスイッチがONになっている間
*変数Fireに2を代入し続ける
*/
if(Old_FullTrg == OFF){
Old_M_Time = M_Time; //フルオートトリガーが押された時間を記録(モーターロック保護処理用)
}
}
if(FullTrg == OFF && Old_FullTrg == ON){
Fire = 1;
delayMicroseconds(CHATA_FULL);
/*フルオートスイッチがONからOFFになったとき
*変数Fireに1を代入し、
*チャタリング防止のため
*定数CHATA_FULLマイクロ秒停止する
*/
}
}
}
//フル・セミオートスイッチの状態を記録する=============================================
Old_SemiTrg = SemiTrg;
Old_FullTrg = FullTrg;
//待機時電圧測定処理===================================================================
if(Fire == 0 && Time - Old_Time >= 500){ //Fireが0かつ、発射後500msおきに
Val = GetVal(analogRead(VAL_IN)); //電圧を取得
if(Val < LIMIT_VAL_S){ //待機時下限値を下回ったとき
Battery_Low = true; //変数Battery_Lowをtrueにする
}
Old_Time = Time; //測定した時間を記録
}
//オートカット処理=====================================================================
while(Fire == 0 && Battery_Low == true){ //バッテリー電圧の低下を検出した場合、動作を停止し、
analogWrite(MOTOR,0); //インジケーターLEDを点滅する
digitalWrite(INDICATOR,HIGH);
delay(100);
digitalWrite(INDICATOR,LOW);
delay(1000);
}
noInterrupts();
//ボルトストップ処理===================================================================
while(Bolt_Stop == true){
Fire = 0;
SemiTrg = OFF, Old_SemiTrg = OFF;
FullTrg = OFF, Old_FullTrg = OFF;
analogWrite(MOTOR,0);
digitalWrite(INDICATOR,HIGH);
while(Cocking_Back == OFF){
Cocking_Back = digitalRead(COCKING_BACK_SW);
}
Cocking_Fowad = digitalRead(COCKING_FOWARD_SW);
if(Cocking_Fowad == ON){
No_Ammo = digitalRead(NO_AMMO_SW);
switch(No_Ammo == LOW){
case true:
Bolt_Stop = false;
digitalWrite(INDICATOR,LOW);
break;
default:
Cocking_Back = OFF;
}
}
/*コッキングハンドル後退検知スイッチがオンになった後、
*残弾無し検知スイッチがオフかつ、
*コッキングハンドル前進検知スイッチがオンになった時、
*ボルトストップを解除する
*コッキングハンドル前進検知スイッチがオンになった時、
*残弾無し検知スイッチがオンの場合はやり直し
*/
}
interrupts();
if(Fire < 0){
Fire = 0;
}
}
//セーフティモード=====================================================================
void SAFETY_MODE() {
analogWrite(MOTOR,0);
Fire = 0;
Semi_Sw = 0;
Cutoff = LOW, Old_Cutoff = LOW;
SemiTrg = OFF, Old_SemiTrg = OFF;
FullTrg = OFF, Old_FullTrg = OFF;
Shot_Mode = SEMI;
Fast_Shot = true;
Cocking_Fowad = LOW;
Cocking_Back = LOW;
/*セーフティスイッチがオンの時、
*モーターを停止し、変数の初期化を行う
*/
}
//センサーの値から電圧を計算===========================================================
unsigned int GetVal(unsigned int A){
float V,Vcc;
Vcc = cpuVcc(); //基準電圧の取得
V = A * Vcc / 1024.0 /V_R2 * (V_R1 + V_R2);
return(unsigned int)(V * 100.0+ VF);//100倍して整数にする
}
// 電源電圧(AVCC)測定関数==============================================================
float cpuVcc(){
unsigned long sum=0;
adcSetup(0x4E); // Vref=AVcc, input=internal1.1V
for(int n=0; n < 10; n++){
sum = sum + adc(); // adcの値を読んで積分
}
return (1.1 * 10240.0)/ sum; // 電圧を計算して戻り値にする
}
// ADコンバーターの設定================================================================
void adcSetup(byte data){
ADMUX = data; // ADC Multiplexer Select Reg.
ADCSRA |= ( 1 << ADEN); // ADC イネーブル
ADCSRA |= 0x07; // AD変換クロック CK/128
delayMicroseconds(500); // 安定するまで待つ
}
// ADCの値を読む=======================================================================
unsigned int adc(){
unsigned int dL, dH;
ADCSRA |= ( 1 << ADSC); // AD変換開始
while(ADCSRA & ( 1 << ADSC) ){ // 変換完了待ち
}
dL = ADCL; // LSB側読み出し
dH = ADCH; // MSB側
return dL | (dH << 8); // 10ビットに合成した値を返す
}2019年05月04日
電子トリガーを作る その3
その2の続き。
電動ガンへの実装を行います。
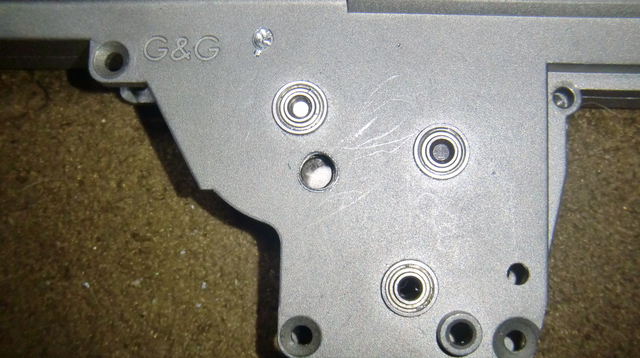
今回取り付けるのは、G&GのF2000。
ETUが搭載されていない旧式です。

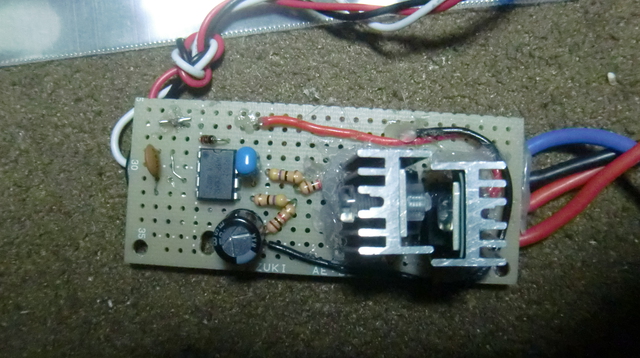
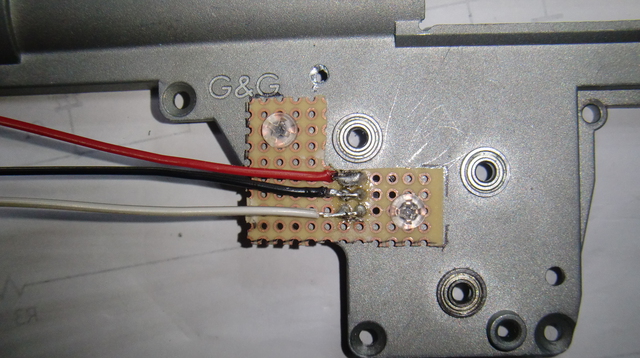
テスト基板を少し変更した実装基板を作りました。
この基板はメカボックスのスイッチが付いていた所に取り付けました。

マイコン基板はバッテリースペース下に入れました。

トリガースイッチは、元の仕様通りフルセミの選択をトリガーストロークで行い、
セミをフォトリフレクタ、フルをマイクロスイッチで検出するようにしました。


そのほか、セーフティスイッチなどを取り付け。

これで実装完了ですが、テストしたところヒューズが飛ぶ問題が起こったので、
次回はその対処とプログラムの改良を行います。
電動ガンへの実装を行います。
今回取り付けるのは、G&GのF2000。
ETUが搭載されていない旧式です。

テスト基板を少し変更した実装基板を作りました。

この基板はメカボックスのスイッチが付いていた所に取り付けました。

マイコン基板はバッテリースペース下に入れました。

トリガースイッチは、元の仕様通りフルセミの選択をトリガーストロークで行い、
セミをフォトリフレクタ、フルをマイクロスイッチで検出するようにしました。


そのほか、セーフティスイッチなどを取り付け。

これで実装完了ですが、テストしたところヒューズが飛ぶ問題が起こったので、
次回はその対処とプログラムの改良を行います。
2019年04月09日
電子トリガーを作る その2
その1の続き。
今回はセミオート射撃をできるようにします。
セミオート射撃のために、カットオフを検出できるようにします。
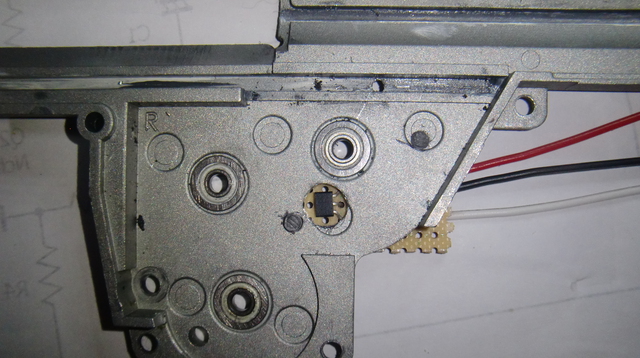
セクターギアに開いている穴に直径5mmの磁石を埋め込み、これをホールICで検出します。

メカボックス越しでは磁力を検出できなかったので、穴を開けます。
ユニバーサル基板にホールICを半田付けし、取り付けのためにメカボックスにネジを切りました。
プログラムは以下の通り。
今回はセミオート射撃をできるようにします。
セミオート射撃のために、カットオフを検出できるようにします。
セクターギアに開いている穴に直径5mmの磁石を埋め込み、これをホールICで検出します。


メカボックス越しでは磁力を検出できなかったので、穴を開けます。

ユニバーサル基板にホールICを半田付けし、取り付けのためにメカボックスにネジを切りました。


プログラムは以下の通り。
//カットオフテスト用
//入出力ピンの名称変更
#define SEMI_SW 4 //セミオートスイッチ
#define CUTOFF_SW 3 //カットオフセンサー
#define MOTOR 9 //モーター制御出力
#define LED 13 //マイコンLED
//定数の宣言
const int Chata = 0; //チャタリング防止(マイクロ秒)
const bool ON = LOW; //スイッチ用定数、混乱防止のため
const bool OFF = HIGH;
//変数の宣言
int Fire = 0; //発射制御用変数
bool Coff = LOW; //カットオフセンサー用変数
bool Old_Coff = LOW;
bool SemiTrg = HIGH; //セミオートスイッチ用変数
bool Old_SemiTrg = HIGH;
void setup() {
//入出力ピンの設定
pinMode(SEMI_SW,INPUT);
pinMode(CUTOFF_SW,INPUT);
pinMode(LED,OUTPUT);
}
void loop() {
//現在の各スイッチの状態を検知
Coff = digitalRead(CUTOFF_SW);
SemiTrg = digitalRead(SEMI_SW);
//カットオフスイッチの状態をLEDで表示
if(Coff == HIGH){
digitalWrite(LED,HIGH);
}
if(Coff == LOW){
digitalWrite(LED,LOW);
}
if(Fire >= 1){
analogWrite(MOTOR,254); //変数Fireが1以上のときモーター作動
}
if(Fire > 1){
//カットオフ処理
if(Coff == HIGH && Old_Coff == LOW){
Fire = Fire - 1;
/*カットオフスイッチがLOWからHIGHなったときに
*変数Fireの数字を1引く
*/
}
if(Coff == LOW && Old_Coff == HIGH){
/*物理スイッチを使用する際のチャタリング防止用
*/
}
Old_Coff = Coff;
}
if(Fire == 1){
if(Coff == HIGH && Old_Coff == LOW){
analogWrite(MOTOR,0);
Fire = 0;
/*変数Fireが1に等しい場合、
*カットオフスイッチがLOWからHIGHになったとき
*モーターを停止する
*/
}
if(Coff == LOW && Old_Coff == HIGH ){
/*物理スイッチを使用する際のチャタリング防止用
*/
}
Old_Coff = Coff;
}
if(Fire == 0){
/*トリガー処理、変数Fireの値が0の時のみ
*トリガー入力を受け付ける
*/
analogWrite(MOTOR,0);
if(SemiTrg == ON && Old_SemiTrg == OFF){
Fire = 1;
/*トリガーがOFFからONになったとき
*変数Fireに1を代入する
*/
}
if(SemiTrg == OFF && Old_SemiTrg == ON){
delayMicroseconds(Chata);
/*トリガーがONからOFFになったとき
*チャタリング防止のため
*変数chataマイクロ秒停止する
*/
}
Old_SemiTrg = SemiTrg;
}
if(Fire < 0){
Fire = 0;
}
}2019年04月08日
電子トリガーを作る その1
電子トリガーに興味を持ち、色々と調べてみたら
こんなものを見つけて、自分でも作れそうだったので
作ってみることにしました。
以前、ガスガン内蔵ヒーター制御装置を作る際、テストに使ったArduino Nano互換機。
これを使います。
プログラム用のソフト他はこちらを参照してください。

まずはモーターを動かすモータードライバを作ります。
見つけた回路図をほぼそのまま流用して作りました。
詳細についてはこちらを参照してください。
回路図のマイコンVINと出力PINの所をスイッチで繋ぐとそのまま動かせます。
次はマイコンを繋いでテストします。
プログラムは以下の通り。
動かすとこんな感じです。
このモータードライバーは連続して動かすことができないので、
PWM出力でブートストラップコンデンサを充電する時間を作る必要があります。
次回から電動ガンへの実装を行います。
こんなものを見つけて、自分でも作れそうだったので
作ってみることにしました。
以前、ガスガン内蔵ヒーター制御装置を作る際、テストに使ったArduino Nano互換機。
これを使います。
プログラム用のソフト他はこちらを参照してください。

まずはモーターを動かすモータードライバを作ります。
見つけた回路図をほぼそのまま流用して作りました。
詳細についてはこちらを参照してください。

回路図のマイコンVINと出力PINの所をスイッチで繋ぐとそのまま動かせます。
次はマイコンを繋いでテストします。
プログラムは以下の通り。
//モータードライバーテスト用
void setup() {
pinMode(2,INPUT);
pinMode(3,INPUT);
pinMode(4,INPUT);
}
void loop() {
if(digitalRead(2)==HIGH){
analogWrite(5,255); //出力100%、しばらくすると動かなくなる
}
else if(digitalRead(3)==HIGH){
analogWrite(5,123); //出力50%
}
else if(digitalRead(4)==HIGH){
analogWrite(5,254); //出力99%、連続使用できる限界
}
else{
analogWrite(5,0);
}
}動かすとこんな感じです。
このモータードライバーは連続して動かすことができないので、
PWM出力でブートストラップコンデンサを充電する時間を作る必要があります。
次回から電動ガンへの実装を行います。
2019年04月02日
NcStar ADO 3 – 9 x 42mmスコープ&レッドドットサイト
新しく買ったエアガン用にアマゾンに売っていた
NcStarというメーカーのスコープを買いました。


箱の中に専用ケースとスコープがありました。


スコープ本体の見た目。
近未来的なデザインが気に入っています。

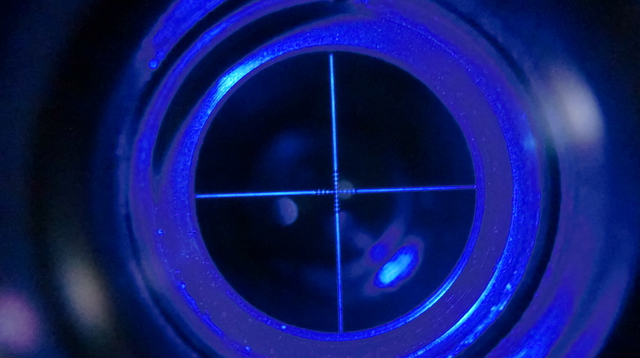
スコープを覗くとこんな感じ。

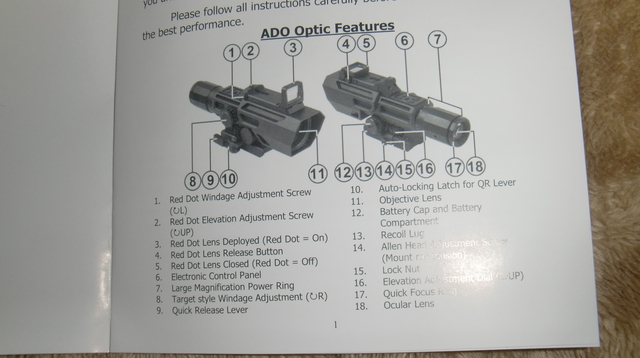
付属している説明書等。
すべて英語で書かれています。
スコープのエレベーションとウィンデージダイヤル。
エレベーションは下に付いています。

ドットサイトのエレベーションとウィンデージダイヤル。
マイナスネジを回して調整します。

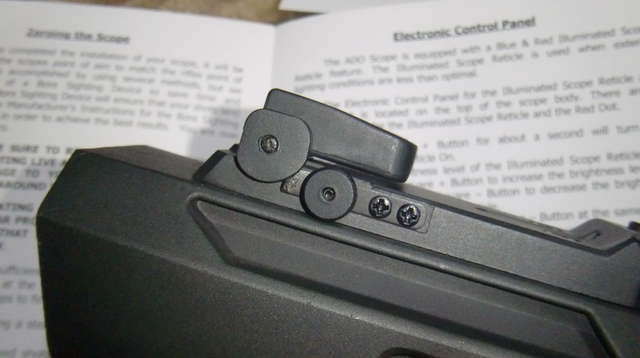
本体上部のコントロールパネル。
手前の四角ボタンがスコープ側、奥の丸ボタンがドットサイト側の光量調整です。
中央のボタンでスコープイルミネーションの色を変更できます。
スコープのイルミネーションをオンにするには+ボタンを長押し、 オフにするには+と-ボタンを同時押しします。


ドットサイトは可倒式で左側にロック解除レバーがあります。
ロックを解除すれば自動で立ち上がり、ドットサイトがオンになります。
手で倒せばオフになります。


スコープとドットサイト共通の電源としてCR123A電池を1つ使います。


新しく買ったエアガンに取り付けてみました。

NcStarというメーカーのスコープを買いました。


箱の中に専用ケースとスコープがありました。


スコープ本体の見た目。
近未来的なデザインが気に入っています。

スコープを覗くとこんな感じ。

付属している説明書等。
すべて英語で書かれています。


スコープのエレベーションとウィンデージダイヤル。
エレベーションは下に付いています。

ドットサイトのエレベーションとウィンデージダイヤル。
マイナスネジを回して調整します。

本体上部のコントロールパネル。
手前の四角ボタンがスコープ側、奥の丸ボタンがドットサイト側の光量調整です。
中央のボタンでスコープイルミネーションの色を変更できます。
スコープのイルミネーションをオンにするには+ボタンを長押し、 オフにするには+と-ボタンを同時押しします。



ドットサイトは可倒式で左側にロック解除レバーがあります。
ロックを解除すれば自動で立ち上がり、ドットサイトがオンになります。
手で倒せばオフになります。



スコープとドットサイト共通の電源としてCR123A電池を1つ使います。


新しく買ったエアガンに取り付けてみました。

タグ :NcStar
2019年03月31日

2019年03月20日
A&K SVDにダブルイーグルM905用マガジンを流用する方法
A&KのSVDを実戦投入するためにマガジンを確保しようとしましたが、
マガジンがどこにも売っていません。
流用できそうなマガジンを探していたら、ダブルイーグルM905用マガジンを見つけました。
右がA&K、左がダブルイーグル。
ぱっと見、よく似ています。
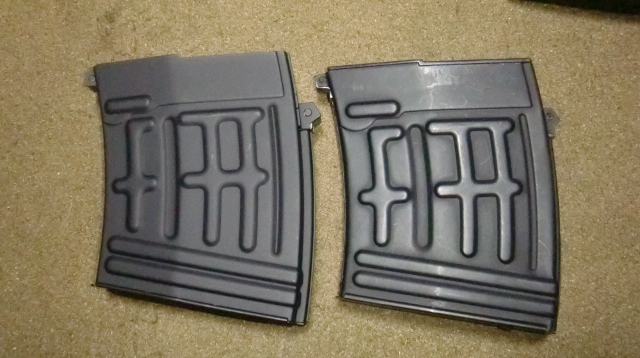

早速マガジンを装着しようとしましたが、案の定入りません。

よく見てみると、前側の出っ張りが少し大きいようなのでヤスリで削りました。
(右がダブルイーグル、左がA&K)


マガジンが入るようになりましたが、今度は給弾されません。
マガジンが小さいようで後ろ側に隙間ができていて、ストッパーを押し切れていないようです。

マガジンの後ろ側にプラ板を接着してストッパーを押せるようにしました。
メカボックスを外した状態で試したら、給弾されるようになりました。

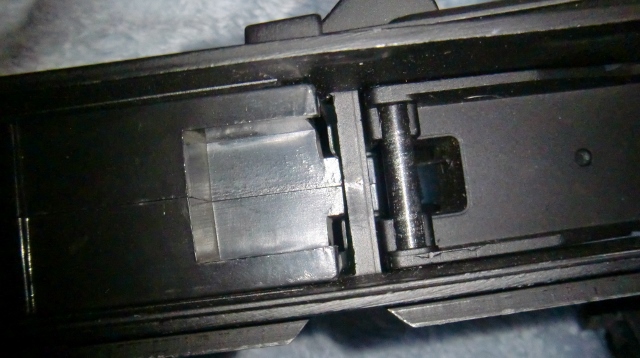
しかし、メカボックスを取り付けた状態で試したら、マガジンキャッチが掛からなくなりました。
メカボックスを避ける凹みの深さが足りていないようです。

へこみの深さはA&Kが15mm、ダブルイーグルは12mm。
3mm削る必要があります。


マガジンの中身を出して、凹みの上側を切除、ヤスリで削ります。


外側もヤスリで削ります。
鉄製で、少し厚みがあるので苦労しました。

装着して給弾することを確認して完了です。
マガジンがどこにも売っていません。
流用できそうなマガジンを探していたら、ダブルイーグルM905用マガジンを見つけました。
右がA&K、左がダブルイーグル。
ぱっと見、よく似ています。


早速マガジンを装着しようとしましたが、案の定入りません。

よく見てみると、前側の出っ張りが少し大きいようなのでヤスリで削りました。
(右がダブルイーグル、左がA&K)


マガジンが入るようになりましたが、今度は給弾されません。
マガジンが小さいようで後ろ側に隙間ができていて、ストッパーを押し切れていないようです。

マガジンの後ろ側にプラ板を接着してストッパーを押せるようにしました。
メカボックスを外した状態で試したら、給弾されるようになりました。


しかし、メカボックスを取り付けた状態で試したら、マガジンキャッチが掛からなくなりました。
メカボックスを避ける凹みの深さが足りていないようです。

へこみの深さはA&Kが15mm、ダブルイーグルは12mm。
3mm削る必要があります。


マガジンの中身を出して、凹みの上側を切除、ヤスリで削ります。


外側もヤスリで削ります。
鉄製で、少し厚みがあるので苦労しました。

装着して給弾することを確認して完了です。
2019年03月20日
PSO-1スコープ(レプリカ)
A&KのSVD用にPSO-1レプリカスコープを買いました。


これはアマゾンに売ってあった3-9倍率のモデルです。

重量は722g。

説明書も付属していますが、
すまねぇ、ロシア語はさっぱりだ。


エレベーションとウィンデージダイヤルです。


ゼロインは上についているプラスネジを外して、黒いダイヤルを回して行います。
(実物は上のネジを外さず緩めるだけです。)


マウント取り付けの調整に使うレンチです。

使い方はラジオペンチなどで押さえながらナットを回して調整します。


イルミネーション用の電池は単三電池です。
中国語で書かれた電池が付属しています。

点灯させるとこんな感じです。

A&KのSVDへ取り付けました。
特に加工なしで取り付けられました。



これはアマゾンに売ってあった3-9倍率のモデルです。

重量は722g。

説明書も付属していますが、
すまねぇ、ロシア語はさっぱりだ。


エレベーションとウィンデージダイヤルです。


ゼロインは上についているプラスネジを外して、黒いダイヤルを回して行います。
(実物は上のネジを外さず緩めるだけです。)


マウント取り付けの調整に使うレンチです。

使い方はラジオペンチなどで押さえながらナットを回して調整します。


イルミネーション用の電池は単三電池です。
中国語で書かれた電池が付属しています。

点灯させるとこんな感じです。

A&KのSVDへ取り付けました。
特に加工なしで取り付けられました。

2019年03月19日
はじめての流速カスタム(A&K電動SVD)
大分前に購入していた、A&K電動SVD。

一応撃てるようにいじっていますが、M14との差別化ができずに放置していました。
そこで流速カスタムの実験台に使うことにしました。
流速カスタムで0.28g弾を飛ばせるようにし、遠距離特化にします。
まず、分解してメカボックスを取り出します。
本体右側の六角ネジを外します。

マガジンキャッチ付近のピンを左側から抜き出します。

トリガーガードを取り外し、レシーバー下の部品を取り外します。


チャンバーブロック両脇の芋ネジを緩めて取り外します。
チャンバーは同社製ミニミと同様の構造で、同じような改良をしてあります。
ついでに長掛けホップにしてあります。


メカボックスを後ろに引きながら、前側を下から押し上げて取り外します。



メカボックス後ろからスプリングを取り外せます。
タペットスプリングは外に露出しているので取り外します。

メカボックスのプラスネジを外して分割します。

流速カスタムの原理などは検索すればいっぱい出てくるので省略。
ピストンに重りをつけて重くして、強めのスプリングを入れます。
ピストンに鉛シートで作った重りを入れて、35g程にします。
スプリングはKM企画の0.9Jスプリングを入れます。


このままでは法定初速をオーバーするので、インナーバレルを切断して調整します。
588mm→200mmに切断しました。



ついでにモーターを交換し、FETを取り付けます。
モーターはSHSのハイトルクモーターに交換します。

モータ軸が少し長いので切断して調整しました。


FETはXCORTECHのデュアルFETをグリップ内の空洞に入るように取り付けました。

レスポンスを向上させるため、11.1Vリポバッテリーを使います。

コネクターはXT60コネクターに交換しました。


これでカスタム完了です。
初速をマルイ0.20、0.25、0.28gの弾を使い、ホップ最弱時の初速と初速最大値を測ります。
0.20gホップ最弱 81.1m/s

0.20g初速最大 93.2m/s

0.25gホップ最弱 76.8m/s

0.25g初速最大 83.4m/s

0.28gホップ最弱 75.7m/s

0.28g初速最大 79.6m/s

どの弾でも0.9J以下でちょうどいいぐらいです。

一応撃てるようにいじっていますが、M14との差別化ができずに放置していました。
そこで流速カスタムの実験台に使うことにしました。
流速カスタムで0.28g弾を飛ばせるようにし、遠距離特化にします。
まず、分解してメカボックスを取り出します。
本体右側の六角ネジを外します。

マガジンキャッチ付近のピンを左側から抜き出します。

トリガーガードを取り外し、レシーバー下の部品を取り外します。


チャンバーブロック両脇の芋ネジを緩めて取り外します。
チャンバーは同社製ミニミと同様の構造で、同じような改良をしてあります。
ついでに長掛けホップにしてあります。


メカボックスを後ろに引きながら、前側を下から押し上げて取り外します。



メカボックス後ろからスプリングを取り外せます。
タペットスプリングは外に露出しているので取り外します。

メカボックスのプラスネジを外して分割します。

流速カスタムの原理などは検索すればいっぱい出てくるので省略。
ピストンに重りをつけて重くして、強めのスプリングを入れます。
ピストンに鉛シートで作った重りを入れて、35g程にします。
スプリングはKM企画の0.9Jスプリングを入れます。


このままでは法定初速をオーバーするので、インナーバレルを切断して調整します。
588mm→200mmに切断しました。



ついでにモーターを交換し、FETを取り付けます。
モーターはSHSのハイトルクモーターに交換します。

モータ軸が少し長いので切断して調整しました。


FETはXCORTECHのデュアルFETをグリップ内の空洞に入るように取り付けました。

レスポンスを向上させるため、11.1Vリポバッテリーを使います。

コネクターはXT60コネクターに交換しました。


これでカスタム完了です。
初速をマルイ0.20、0.25、0.28gの弾を使い、ホップ最弱時の初速と初速最大値を測ります。
0.20gホップ最弱 81.1m/s

0.20g初速最大 93.2m/s

0.25gホップ最弱 76.8m/s

0.25g初速最大 83.4m/s

0.28gホップ最弱 75.7m/s

0.28g初速最大 79.6m/s

どの弾でも0.9J以下でちょうどいいぐらいです。
2019年02月11日
M1918の修理その2
前回のM1918の修理のつづき。
出来たロウ原型から石膏型を作ります。

使うのはアマゾンで売っていたノリタケ 鋳造用石膏 (G-2)。
これに水を加えて攪拌し、型に流し込みます。
水の量は、石膏の量(g)×混水量(%)で、この石膏の混水量は46~50%なので
1kgに対して水を460~500ml入れます。


水を加えた石膏にロウ原型を沈めます。
ロウが石膏より比重が軽いので浮いてこなくなるまで上から押さえておきます。
1日ほど置いて固まったら枠を外し、湯口を広げます。


鋳造をする前に石膏を250℃で乾燥させる必要があるので、コンベクションオーブンを用意しました。

オーブンを予熱してから、温度を250℃に設定し、完全に乾燥するまで加熱します。
このときロウ原型も揮発して無くなります。
注意 とても臭いがきついので十分に換気してください。


いよいよ鋳造を行います。
アマゾンで買ってきた亜鉛合金に、ルツボとして100均に売ってあったステンレスのカップを使います。


七輪に木炭を入れて火を起こします。


亜鉛合金を入れたカップを火に掛けて中が溶けるまで加熱します。
この亜鉛合金の融点は500℃程度なので割りと簡単に溶けました。


溶けた亜鉛合金を石膏型に流し込み、冷えてから型を破壊して取り出します。

余分な部分を削って元のパーツと見比べてみました。
表面が粗いですがちゃんと出来ているようです。


重量は元のパーツが109g、作ったものが105g。

本体に取り付けられるようにタップを立てます。
タップはM3×0.5ピッチのものです。


肉盛りした部分が邪魔してアウターバレルが奥まで入らなかったので
アウターバレル側を削りました。


アウターバレルを取り付けるためのタップを立てて完成。
何とか元通りにできました。
出来たロウ原型から石膏型を作ります。

使うのはアマゾンで売っていたノリタケ 鋳造用石膏 (G-2)。
これに水を加えて攪拌し、型に流し込みます。
水の量は、石膏の量(g)×混水量(%)で、この石膏の混水量は46~50%なので
1kgに対して水を460~500ml入れます。


水を加えた石膏にロウ原型を沈めます。
ロウが石膏より比重が軽いので浮いてこなくなるまで上から押さえておきます。
1日ほど置いて固まったら枠を外し、湯口を広げます。


鋳造をする前に石膏を250℃で乾燥させる必要があるので、コンベクションオーブンを用意しました。

オーブンを予熱してから、温度を250℃に設定し、完全に乾燥するまで加熱します。
このときロウ原型も揮発して無くなります。
注意 とても臭いがきついので十分に換気してください。


いよいよ鋳造を行います。
アマゾンで買ってきた亜鉛合金に、ルツボとして100均に売ってあったステンレスのカップを使います。


七輪に木炭を入れて火を起こします。


亜鉛合金を入れたカップを火に掛けて中が溶けるまで加熱します。
この亜鉛合金の融点は500℃程度なので割りと簡単に溶けました。


溶けた亜鉛合金を石膏型に流し込み、冷えてから型を破壊して取り出します。

余分な部分を削って元のパーツと見比べてみました。
表面が粗いですがちゃんと出来ているようです。


重量は元のパーツが109g、作ったものが105g。

本体に取り付けられるようにタップを立てます。
タップはM3×0.5ピッチのものです。


肉盛りした部分が邪魔してアウターバレルが奥まで入らなかったので
アウターバレル側を削りました。


アウターバレルを取り付けるためのタップを立てて完成。
何とか元通りにできました。
2019年02月11日
M1918の修理その1
M1918を壊してしまいました。


うっかり落としたときにチャンバーブロックが真っ二つ。
普通ならパーツ交換すれば良いのですが、
この銃はパーツが売っていません。

エポキシ接着剤でくっつけてみましたが、重いアウターバレルを支えるには強度が不足しています。
つまり修理不可能、この銃は廃棄処分になってしまいます。
それでは困るのでなんとかします。
どうするかというと、壊れたパーツを元に複製します。
具体的には、
壊れたパーツをシリコンで型取り
↓
シリコン型でロウ原型を作成
↓
ロストワックス法で石膏型を作成
↓
亜鉛合金で鋳造
↓
仕上げ、タップ立て
↓
完成
今回はロウ原型を作るところまでいきます。


紙コップを枠に使ってシリコンを流し込みます。
シリコン型は上下で分割するので、半分は粘土で埋めておきます。

シリコンを流し込む前に剥離剤を塗ります。
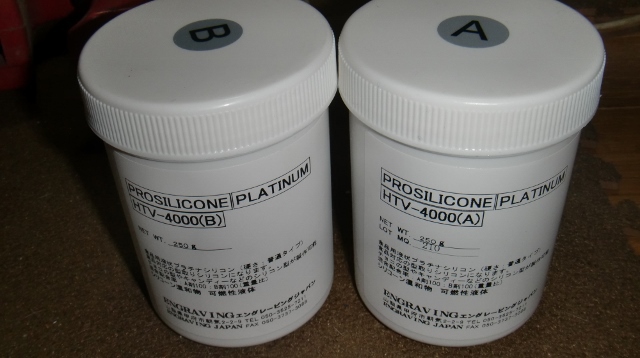
今回使ったシリコンはA材とB材を同量混ぜるタイプです。

剥離剤が乾いた後、シリコンを流し込みます。


シリコンが固まったら裏返して、粘土を取り除きます。

ロウを流し込む湯口を付けてみましたが、この形では型からそのまま抜き取ることが出来ませんでした。
剥離剤を塗って枠を取り付け、再びシリコンを流し込みます。


シリコンが固まったら枠から外し、型を割り、原型を取り外します。

流し込むロウは100均に売ってあった仏壇用のものです。


湯煎で溶かして型に流し込みます。
流し込んだらすぐに揺すって空気を抜きます。

型から取り外し、バリを取り、別に作った湯口を取り付けてロウ原型は完成です。
次回は鋳造をします。


うっかり落としたときにチャンバーブロックが真っ二つ。
普通ならパーツ交換すれば良いのですが、
この銃はパーツが売っていません。

エポキシ接着剤でくっつけてみましたが、重いアウターバレルを支えるには強度が不足しています。
つまり修理不可能、この銃は廃棄処分になってしまいます。
それでは困るのでなんとかします。
どうするかというと、壊れたパーツを元に複製します。
具体的には、
壊れたパーツをシリコンで型取り
↓
シリコン型でロウ原型を作成
↓
ロストワックス法で石膏型を作成
↓
亜鉛合金で鋳造
↓
仕上げ、タップ立て
↓
完成
今回はロウ原型を作るところまでいきます。


紙コップを枠に使ってシリコンを流し込みます。
シリコン型は上下で分割するので、半分は粘土で埋めておきます。

シリコンを流し込む前に剥離剤を塗ります。

今回使ったシリコンはA材とB材を同量混ぜるタイプです。

剥離剤が乾いた後、シリコンを流し込みます。


シリコンが固まったら裏返して、粘土を取り除きます。

ロウを流し込む湯口を付けてみましたが、この形では型からそのまま抜き取ることが出来ませんでした。
剥離剤を塗って枠を取り付け、再びシリコンを流し込みます。


シリコンが固まったら枠から外し、型を割り、原型を取り外します。

流し込むロウは100均に売ってあった仏壇用のものです。


湯煎で溶かして型に流し込みます。
流し込んだらすぐに揺すって空気を抜きます。

型から取り外し、バリを取り、別に作った湯口を取り付けてロウ原型は完成です。
次回は鋳造をします。
